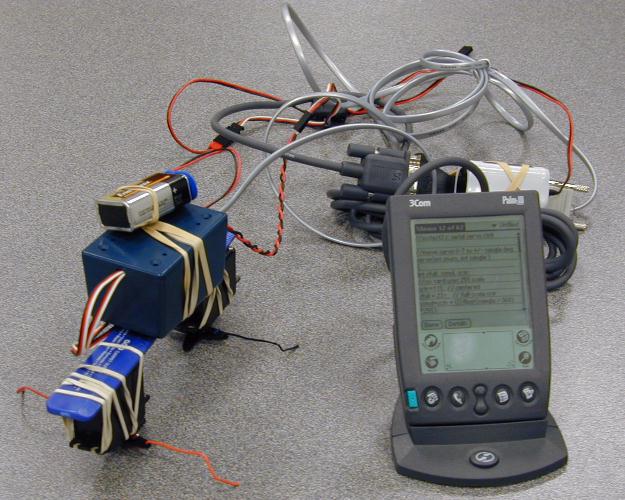
(Image courtesy of Jeff Sampson of the Twin Cities Robotics Group ).
This was my first walking robot.
(Image courtesy of Jeff
Sampson of the Twin Cities Robotics
Group ).
The blue box contains the Scott Edwards Serial
Servo Controller (R) card.
The PalmIII is running PocketC
(R) compiler which allows programs to be written as Memos then compiled.
This version of my Palm Robot Control Program
allows specification of turn angle and number of steps to take.
A later version has other parameters set the stride angle, servo slew
time, turn coupling (negative for normal turns, positive for crab-walking).
This robot has been superceded by the "QuadraTwist".
Back to Jeff's Robots page.
Back to Jeff's Home page.